|
openPSTD
2.0
Open source simulation for sound propagation in urban environments
|
|
openPSTD
2.0
Open source simulation for sound propagation in urban environments
|
Callback interface for communication with the CLI or the GUI. More...
#include <KernelInterface.h>
Public Member Functions | |
| virtual void | Callback (CALLBACKSTATUS status, std::string message, int frame)=0 |
| This callback will be called with information how far the kernel is progressed. More... | |
| virtual void | WriteFrame (int frame, int domain, PSTD_FRAME_PTR data)=0 |
| Return pressure data of scene to callback handler. More... | |
| virtual void | WriteSample (int startSample, int receiver, std::vector< float > data)=0 |
| Return receiver data of scene to callback handler. More... | |
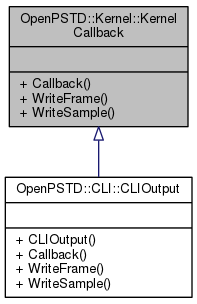
Callback interface for communication with the CLI or the GUI.
This callback is passed to the kernel to return simulation information to the requester. Main use case is passing the observed pressure values, the warnings and the errors.
|
pure virtual |
This callback will be called with information how far the kernel is progressed.
| status | CALLBACKSTATUS enum, either one of starting/running/finishing/error. |
| message | Message to pass to callback handler |
| frame | either positive integer corresponding to time step of data or -1 when kernel is not running. |
Implemented in OpenPSTD::CLI::CLIOutput.
|
pure virtual |
Return pressure data of scene to callback handler.
| frame | Positive integer corresponding to time step of data. |
| domain | an identifier that identifies the domain |
| data | 1D row-major vector of pressure data. |
Implemented in OpenPSTD::CLI::CLIOutput.
|
pure virtual |
Return receiver data of scene to callback handler.
| startSample | Positive integer corresponding to time step of the first data point. |
| receiver | an identifier that identifies the receiver |
| data | a set of data points |
Implemented in OpenPSTD::CLI::CLIOutput.
 1.8.11
1.8.11

